Robots
The Robots: Modules all the way
Wheeled robot
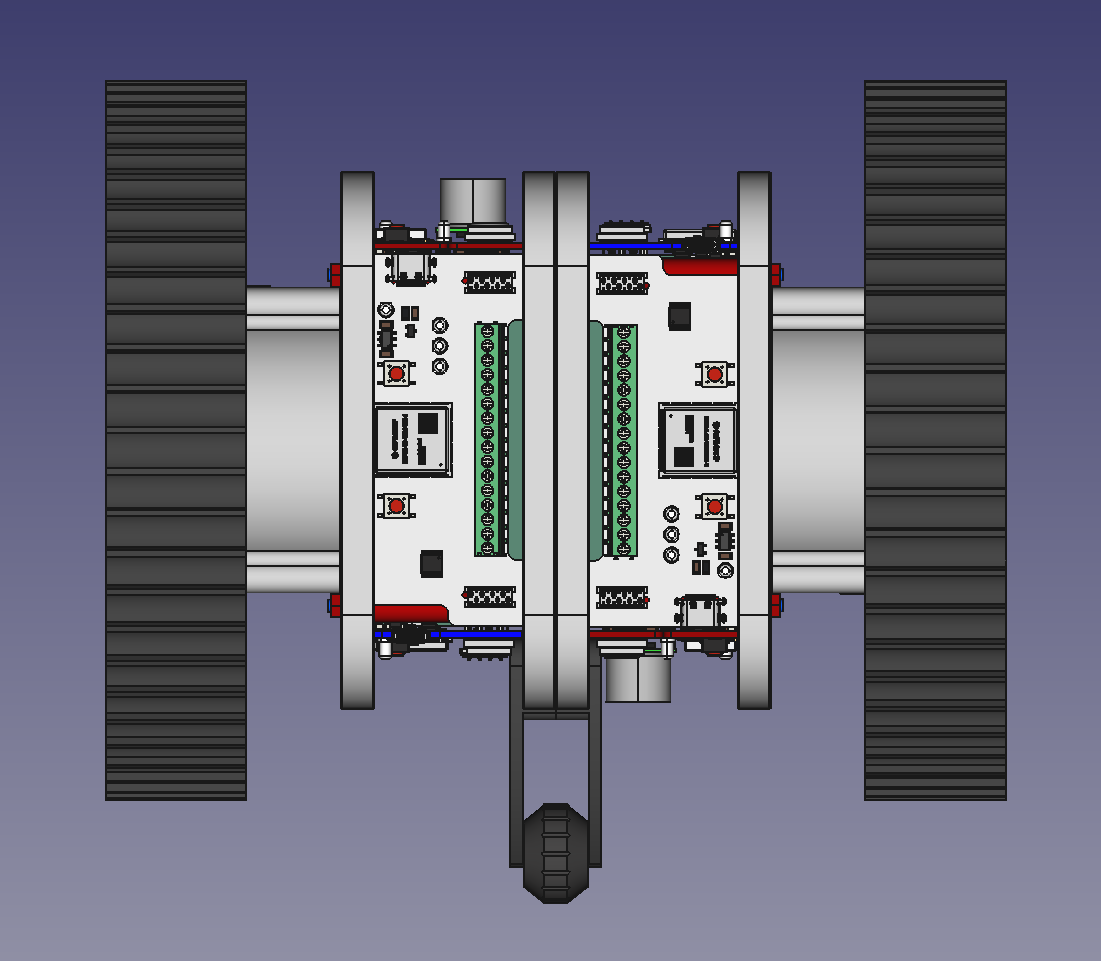 | 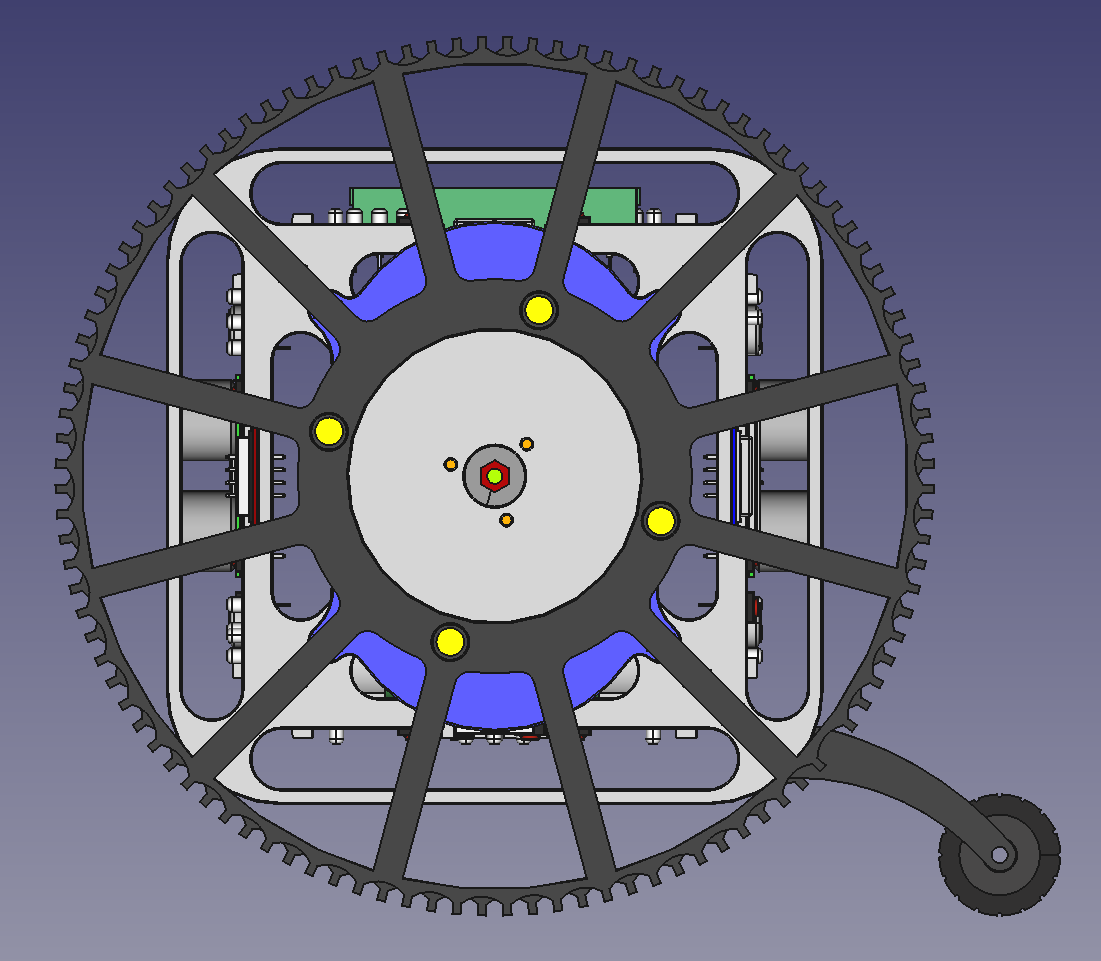 |
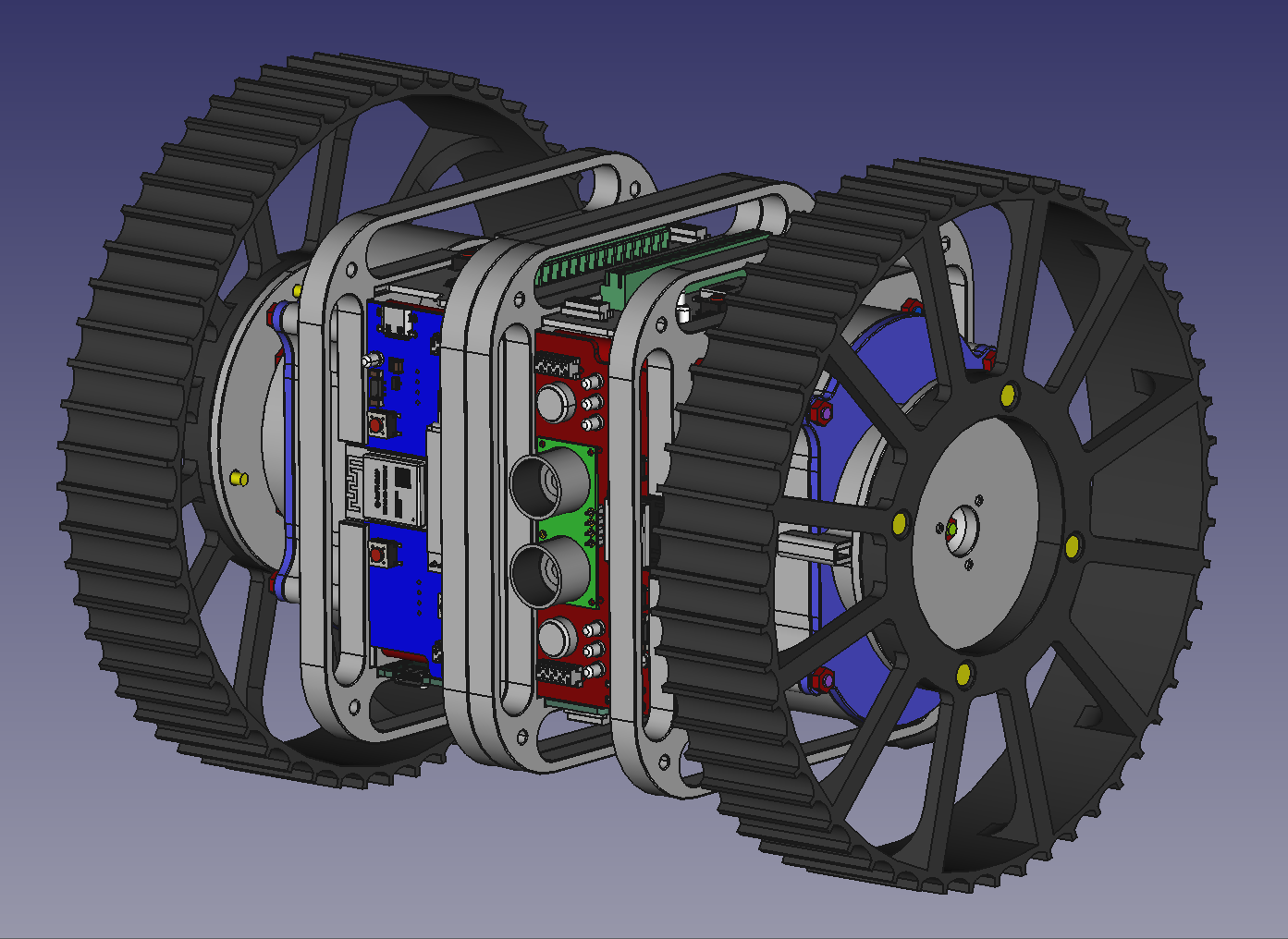
The wheeled robot is constructed from two GEMS systems with added wheels and trailing support. The robot has a differential drive and can move on flat surfaces. The Robot modules are positioned so that both modules with the batteries are placed at the bottom for better stability. One sensorial module is facing forward and the other backward so that the robot can detect objects on its potential path. Coordination between the two GEMS systems is conducted via wireless communication.
Articulated robot
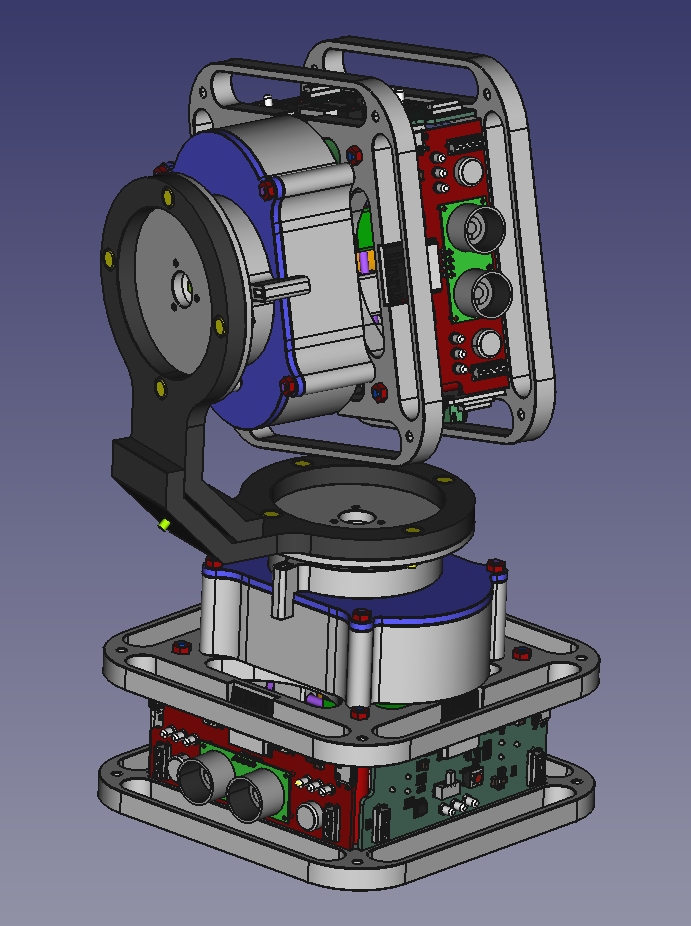 |  | 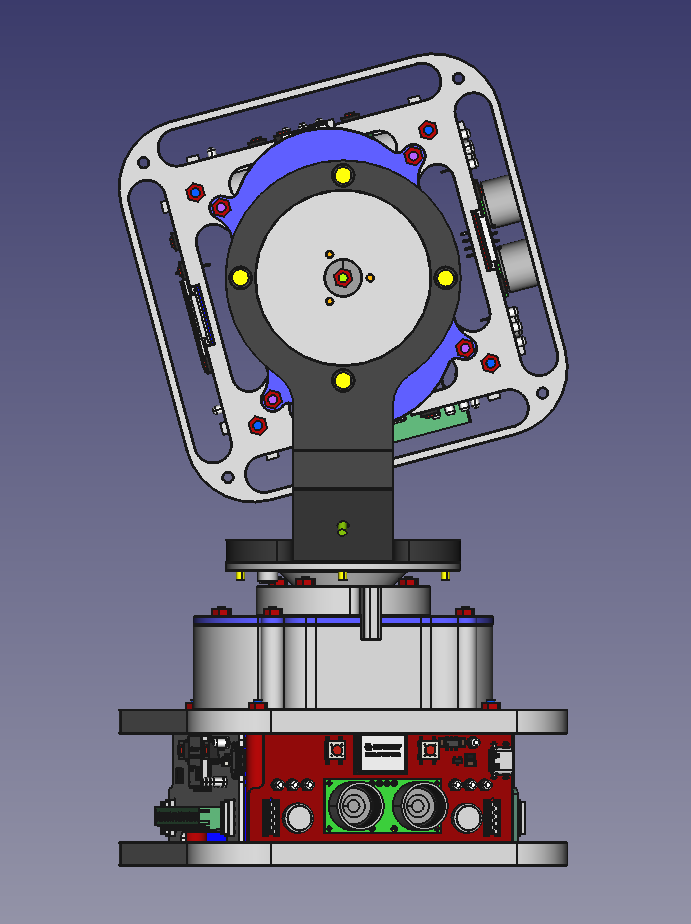 |
The articulated robot is also constructed from two GEMS systems connected with a link that allows robot to scan the enviroment around it with an ultrasound sensor on one of the GEMS systems. The robot has 2-DOF, is stationary and operates in a spherical coordinate system. Coordination between the two GEMS systems is conducted via wireless communication.